Робототехника: Захватывающая игра в кегельринг с Lego EV3
Введение в кегельринг
Добро пожаловать в увлекательный мир робототехники! В этом блоге мы погрузимся в захватывающую игру под названием “кегельринг”, которая является одним из популярных соревновательных форматов в робототехнике. Кегельринг – это увлекательное состязание, где роботам необходимо вытолкнуть кегли за пределы игрового поля, демонстрируя свои навыки управления и программирования.
Основные правила кегельринга

Основная задача робота в кегельринге – обнаружить кегли на игровом поле и вытолкнуть их за его пределы. Существуют определенные критерии, которым должен соответствовать робот:
- Робот должен вернуться в исходное положение после выталкивания кегли.
- Робот не должен находиться за внешними границами игрового поля более 3 секунд.
- На демонстрацию действий робота дается 1 минута, обычно с двумя попытками.
Создание программы для кегельринга
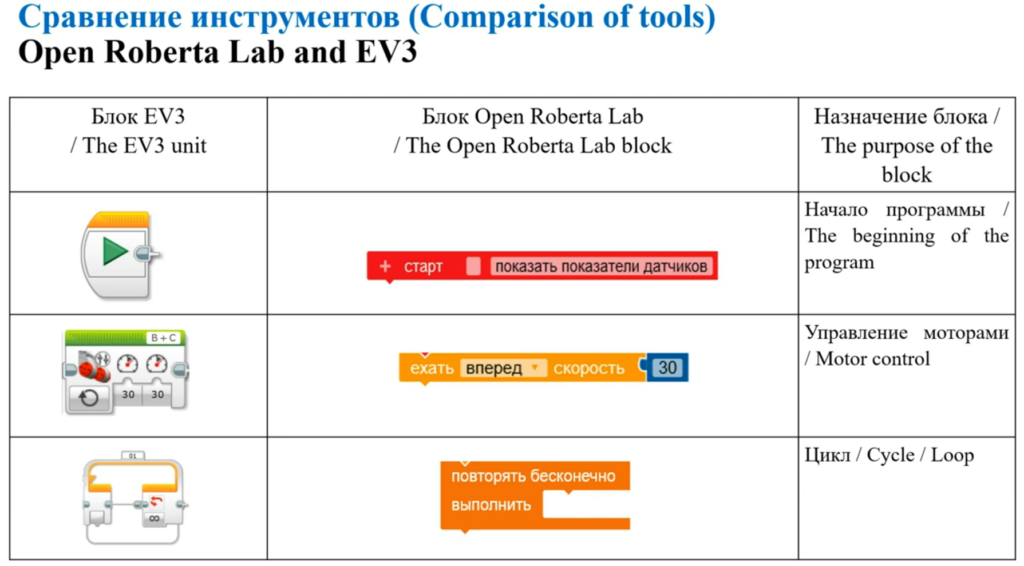
Для реализации программы управления роботом в кегельринге нам понадобятся следующие ключевые блоки:
- Блоки независимого управления моторами
- Блок цикла для создания бесконечного цикла
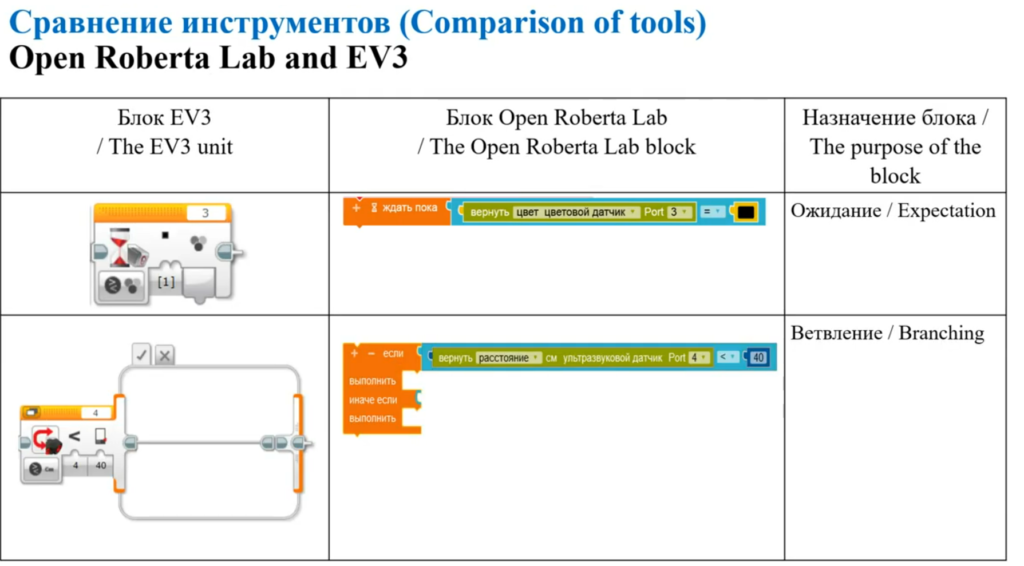
- Блок переключателя для реализации условий
- Блок датчика расстояния для обнаружения препятствий
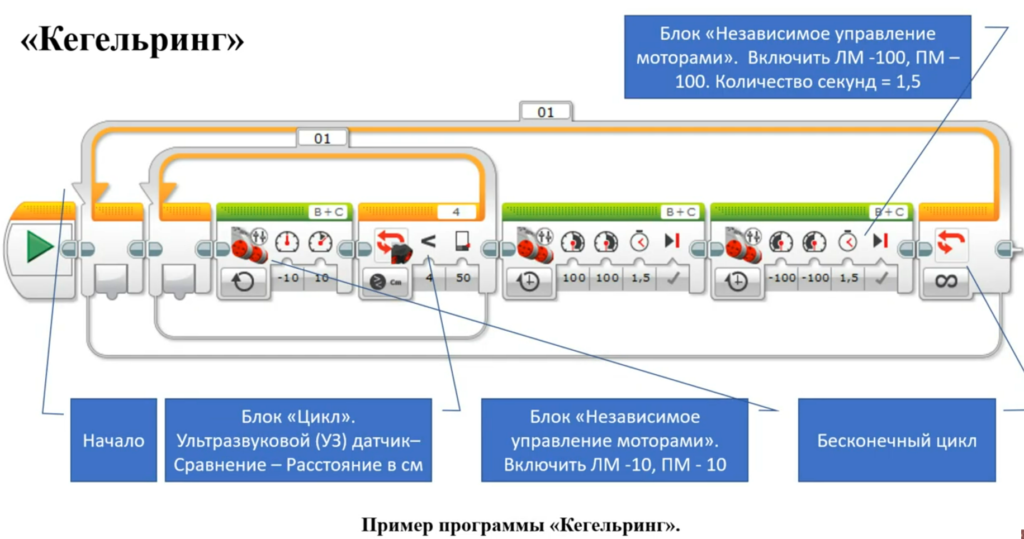
Алгоритм работы программы довольно простой:
- Робот будет постоянно разворачиваться, пока не обнаружит препятствие (кеглю) на расстоянии менее 50 см.
- Как только препятствие будет обнаружено, робот будет двигаться вперед, чтобы вытолкнуть его за пределы игрового поля.
- После выталкивания кегли робот вернется в исходное положение, чтобы продолжить поиск следующего препятствия.
- Весь процесс будет выполняться в бесконечном цикле.
Программирование в Open Roberta Lab
Давайте рассмотрим, как мы можем реализовать программу для кегельринга в среде Open Roberta Lab. Это бесплатная платформа для визуального программирования роботов, которая позволяет создавать и тестировать программы без необходимости использования реального робота.
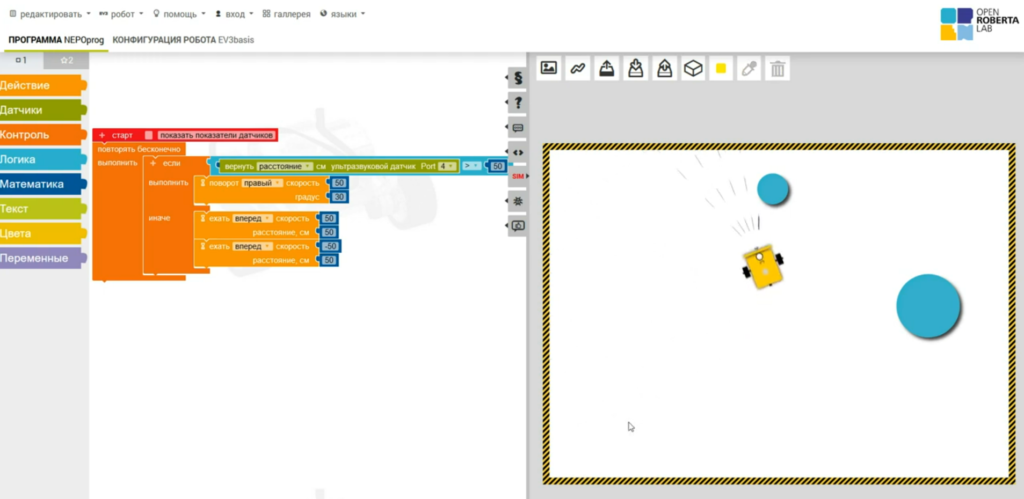
Первым шагом будет создание бесконечного цикла из блока “Повторять бесконечно”. Внутри этого цикла мы добавим блок “Если иначе” из раздела “Логика”. Это позволит нам реализовать условие, при котором робот будет разворачиваться, если расстояние до препятствия больше 50 см, или двигаться вперед, если расстояние меньше 50 см.
Для определения расстояния до препятствия мы будем использовать блок “Расстояние” из раздела “Датчики”. Этот блок вернет расстояние в сантиметрах, которое мы сравним с числом 50.
Если расстояние больше 50 см, робот будет поворачивать вправо, используя блок независимого управления моторами. Мы установим скорость вращения правого колеса на 30 градусов в секунду, чтобы робот разворачивался, пока не обнаружит препятствие.
Если расстояние меньше 50 см, робот будет двигаться вперед со скоростью 50 и на расстояние 30 см, чтобы вытолкнуть кеглю за пределы игрового поля. Затем робот вернется в исходное положение, двигаясь назад со скоростью -50 и на расстояние 30 см.
Таким образом, программа будет постоянно выполнять этот алгоритм, пока робот не вытолкнет все кегли за пределы игрового поля.
Программирование на реальном роботе Lego EV3
Теперь давайте перейдем к программированию реального робота Lego EV3. Откроем среду программирования Lego Mindstorms Education EV3 и подключим нашего робота.
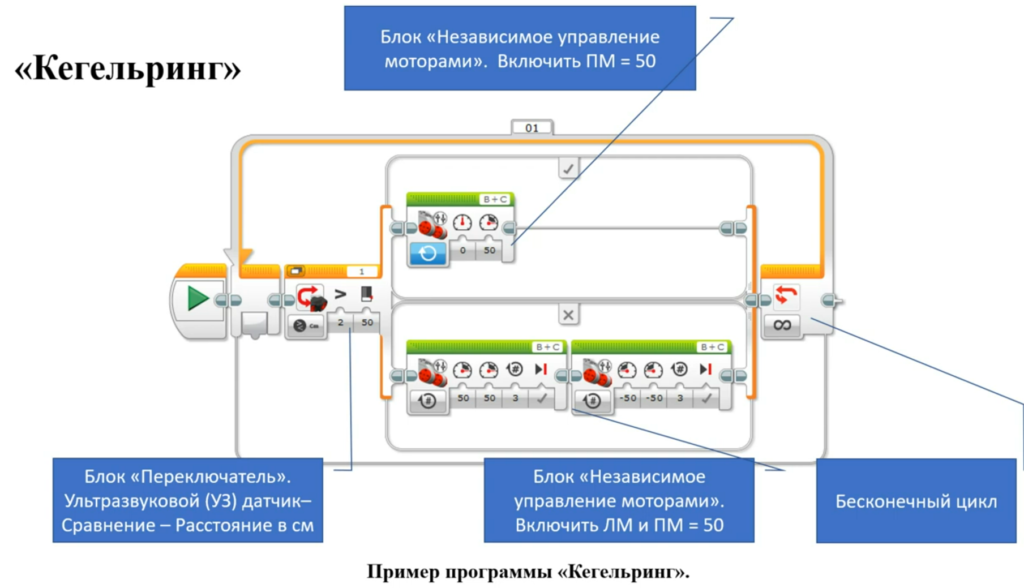
Мы будем использовать те же основные блоки, что и в Open Roberta Lab: бесконечный цикл, переключатель и независимое управление моторами. Однако вместо блока “Расстояние” мы будем использовать ультразвуковой датчик, подключенный к четвертому цифровому порту.
Внутри бесконечного цикла мы добавим блок переключателя, который будет проверять, находится ли препятствие на расстоянии больше 50 см. Если да, робот будет поворачивать вправо, выключая левый мотор и включая правый. Если расстояние меньше 50 см, робот будет двигаться вперед со скоростью 50 и на 3 оборота колес, чтобы вытолкнуть кеглю. Затем он вернется в исходное положение, двигаясь назад со скоростью -50 и на 3 оборота колес.
Загрузим эту программу на реального робота Lego EV3 и протестируем ее на игровом поле. Мы увидим, как робот будет разворачиваться, обнаруживать кегли, вытолкивать их за пределы поля и возвращаться в центр, чтобы продолжить поиск следующих препятствий.
Усложнение игры: Распознавание цвета
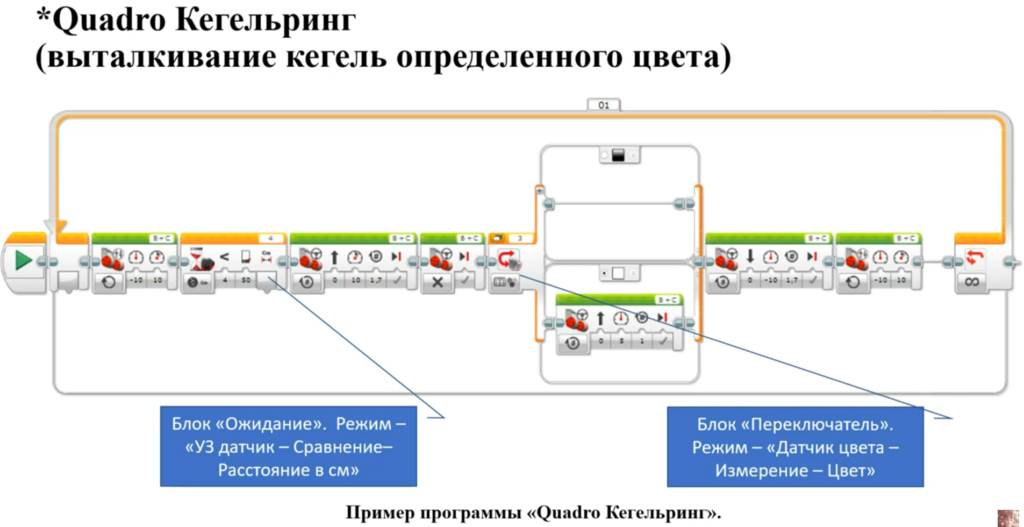
Существует более сложная модификация игры в кегельринг, где робот должен обнаруживать и вытолкивать только кегли определенного цвета, например черного. Для реализации этой задачи потребуется использование цветового датчика, который позволит роботу различать кегли по цвету и выталкивать только нужные.
Таким образом, робототехника предоставляет множество увлекательных возможностей для создания интересных и сложных программ управления. Игра в кегельринг – лишь один из примеров, демонстрирующих, насколько захватывающим может быть мир робототехники.
Заключение
Мы рассмотрели основы игры в кегельринг, познакомились с ключевыми элементами программирования роботов для этого соревнования и даже протестировали программу на реальном роботе Lego EV3. Надеюсь, этот блог вдохновил вас на дальнейшее изучение робототехники и участие в увлекательных соревнованиях.
Все необходимые материалы, включая ссылки на скачивание, доступны по ссылке, представленной в видео. Желаю вам успехов в робототехнике и ярких побед на соревнованиях!